Using Forward- And Reverse-Osmosis to let Astronaut EVA Suits Produce Fresh Water From Urine
An uncomfortable reality with the spacesuits used for extravehicular activities (EVA) – commonly referred to as spacewalks – is that the astronaut spends hours in them, during which normal bodily functions like urinating and defecating continue. The current EVA record at the ISS is currently a hair under nine hours, necessitating a new approach. A team of researchers have now pitched the idea of an in-suit water recovery system with an article by [Sofia Etlin] and colleagues as published in Frontiers in Space Technologies.
For the current Extravehicular Mobility Unit (EMU) EVA spacesuit the current solution is what is called the MAG: the Maximum Absorbency Garment, which is effectively a fancy adult diaper with sodium polyacrylate as absorbent for up to 2 L of fluids. It replaced the urine collection device (UCD) that was used until female astronauts joined the astronaut corps in the 1970s. Generally astronauts aim to not defecate until they finish their EVA, which leaves urinating and the related activity of rehydrating as the spacesuits only have 0.95 L of water that has to last the duration of the spacewalk.

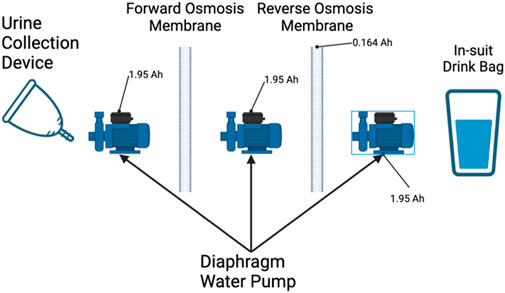
By filtering the urine and recycling it into potable water, this should both prevent all the disadvantages of diapers and give astronauts much more water to drink during EVAs. Although the media reporting on this paper have often referenced the stillsuits of Dune, this device is significantly less advanced and quite bulky, with the filtration equipment contained in a backpack and would weigh about 8 kg. The waste water is filtered using a dual forward osmosis – reverse osmosis (FO-RO) system, with the FO used as a pre-filter to prevent membrane fouling common with RO.
Collecting the urine is performed by a UCD that is more reminiscent of pre-MAG systems, with a silicone cup that conforms to the genitals of the male or female astronaut. When urinating, the inner lining of the cup will detect the moisture and activate a vacuum pump to remove the urine and get it to the FO-RO system as quickly as possible. Filtered water would have salts added before being made available for consumption.
Of note is that this is decidedly still a prototype, but considering that similar technology is already used on the ISS to filter waste water, having a miniature version added to new (EVA) spacesuits seems only a matter of time. It should make hours-long trips strapped into a space capsule decidedly less unpleasant, too, beyond the obvious benefits to astronauts in the midst of an EVA.