Combining Gyro Stabilisation With Weight Shift Balancing
Gyroscopes are perfect to damper short impulses of external forces but will eventually succumb if a constant force, like gravity, is applied. Once the axis of rotation of the mass aligns with the axis of the external torque, it goes into the gimbal lock and loses the ability to compensate for the roll on that axis. [Hyperspace Pirate] tackled this challenge on a gyroscopically stabilized RC bike by shifting a weight around to help keep the bike upright.
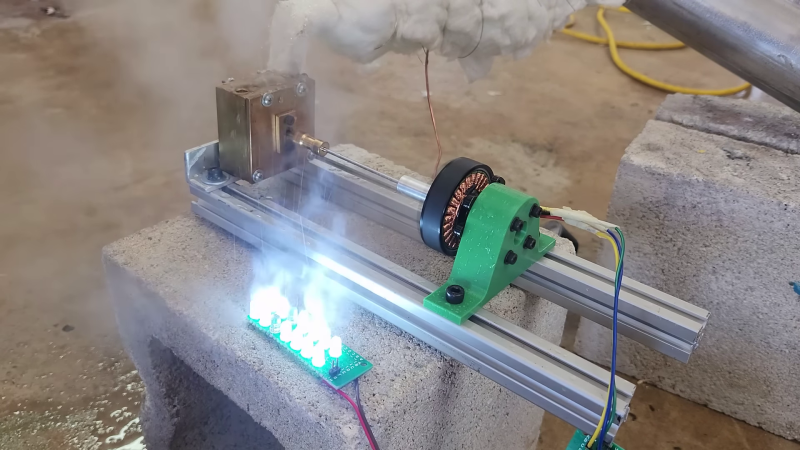
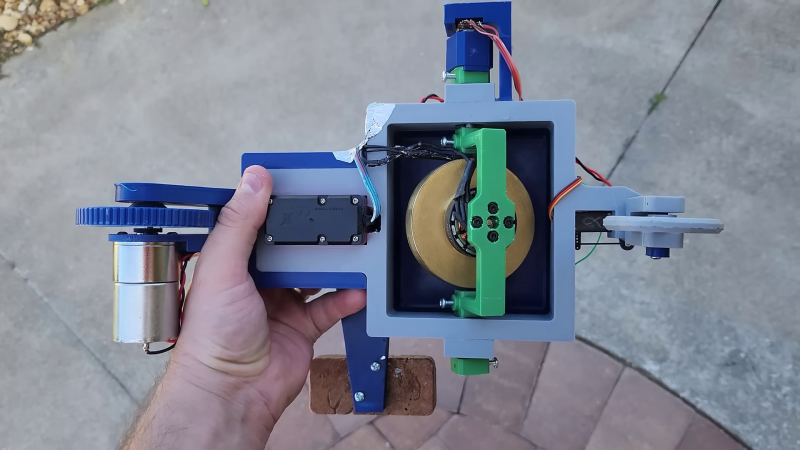
[Hyperspace Pirate] had previously stabilized a little monorail train with a pair of control moment gyroscopes. They work by actively adjusting the tilt of gyroscopes with a servo to apply a stabilizing torque. On this bike, he decided to use the gyro as a passive roll damper, allowing it to rotate freely on the pitch axis. The bike will still fall over but at a much slower rate, and it buys time for a mass on the end of the servo-actuated arm to shift to the side. This provides a corrective torque and prevents gimbal lock.
[Hyperspace Pirate] does an excellent job of explaining the math and control theory behind the system. He implemented a PD-controller (PID without the integral) on an Arduino, which receives the roll angle (proportional) from the accelerometer on an MPU6050 MEMS sensor and the roll rate (Derivative) from a potentiometer that measures the gyro’s tilt angle. He could have just used the gyroscope output from the MPU6050, but we applaud him for using the actual gyro as a sensor.
Like [Hyperspace Pirate]’s other projects, aesthetics were not a consideration. Instead, he wants to experiment with the idea and learn a few things in the process, which we can support.