A Surprisingly Simple Omnidirectional Display

Old-school technology can spark surprising innovations. By combining the vintage zoetrope concept with digital displays, [Mike Ando] created the Andotrope, a surprisingly simple omnidirectional display.
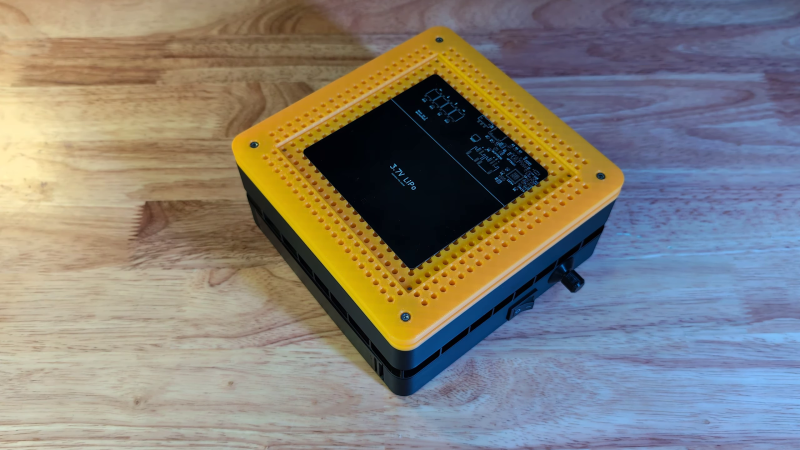
Unlike other 3D displays, the Andotrope lets you view a normal 2D video or images that appear identical irrespective of your viewing angle. The prototype demonstrated in the video below consists of a single smart phone and a black cylinder spinning at 1,800 RPM. A narrow slit in front of each display creates a “scanning” view that our brain interprets as a complete image, thanks to persistence of vision. [Mike] has also created larger version with a higher frame rate, by mounting two tablets back-to-back.
Surprisingly, the Andotrope appears to be an original implementation, and neither [Mike] nor we can find any similar devices with a digital display. We did cover one that used a paper printout in a a similar fashion. [Mike] is currently patenting his design, seeing the potential for smaller displays that need multi-angle visibility. The high rotational speed creates significant centrifugal force, which might limit the size of installations. Critically, display selection matters — any screen flicker becomes glaringly obvious at speed.
This device might be the first of its kind, but we’ve seen plenty of zoetropes over the years, including ones with digital displays or ingenious time-stretching tricks.