ASUS GPU Uses Gyroscope to Warn for Sagging Cards
It’s not really an understatement to say that over the years videocards (GPUs) — much like CPU coolers — have become rather chonky. Unfortunately, the PCIe slots they plug into were never designed with multi-kilogram cards in mind. All this extra weight is of course happily affected by gravity.
The problem has gotten to the point that the ASUS ROG Astral RTX 5090 card added a Bosch Sensortec BMI323 inertial measurement unit (IMU) to provide an accelerometer and angular rate (gyroscope) measurements, as reported by [Uniko’s Hardware] (in Chinese, see English [Videocardz] article).
There are so-called anti-sag brackets that provide structural support to the top of the GPU where it isn’t normally secured. But since this card weighs in at over 6 pounds (3 kilograms) for the air cooled model, it appears the bracket wasn’t enough, and active monitoring was necessary.
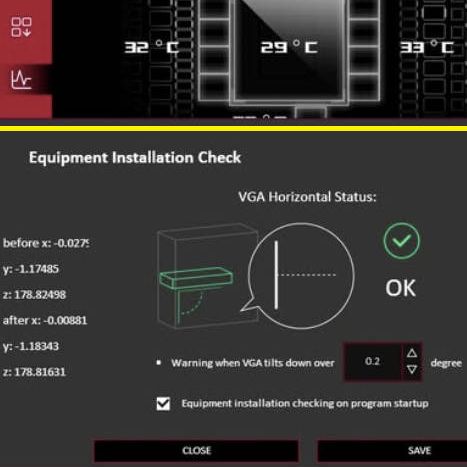
The software allows you to set a sag angle at which you receive a notification, which would presumably either allow you to turn off the system and readjust the GPU, or be forewarned when it is about to rip itself loose from the PCIe slot and crash to the bottom of the case.