Measure Three Times, Design Once
Most of the Hackaday community would never wire a power supply to a circuit without knowing the expected voltage and the required current. But our mechanical design is often more bodged. We meet folks who carefully budget power to their microcontroller, sensors, and so on, but never measure the forces involved in their mechanical designs. Then they’re surprised when the motor they chose isn’t big enough for the weight of their robot.
An obstacle to being more numbers oriented is lack of basic data about the system. So, here are some simple tools for measuring dynamic properties of small mechanisms; distances, forces, velocities, accelerations, torques, and other things you haven’t thought about since college physics. If you don’t have these in your toolkit, how do you measure?
Distance
For longer distances the usual homeowner’s tools work fine. The mechatronics tinkerer benefits from two tools on the small end. A dial or electronic caliper for measuring small things, and a thickness gauge (or leaf gauge) for measuring small slots.
A thickness gauge is just metal leaves in different thicknesses, bolted together at one end. Find a combination of leaves that just fits in the space.
Force
Here’s four force measuring tools we use to cover different magnitudes of force: a postage scale, a push stick, a spring scale, and a letter scale. The postage scale is best purchased. For big things, the bathroom scale works.
A push stick is a force measurement device that you can make yourself. We first saw one of these used to tune slot cars, but they’re universally useful. It’s a simple pen shaped device made with a barrel from any small transparent parts tube, a spring, and a plunger with a protruding pin. Grasp the barrel and push the gizmo with the pin, and you can read the force off the tube.
If you need it to be calibrated, remember that you just bought a postage scale. Push it into the scale and mark off reasonable increments. Make several, in different sizes. A Z or L shaped plunger is useful for hard to reach places.
The conventional spring tension scale is useful, but most commercial ones are terribly made and inaccurate. You can make yourself a better one. They are useful for measuring the spring constant of springs, for learning the tractive effort needed to move a robot, finding the center of gravity of a robot arm, and a hundred other ‘how much oomph’ things. Again, it’s just a matter of connecting a hook to a spring, and measuring its deflection.
For yet lighter weights, you could buy a letter scale, at least in the old days. Today you might have to make your own. It can be as simple as a piece of spring steel fixed to a sheet of calibrated cardboard.
Torque
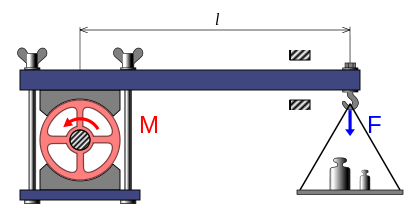
Torque measurements are good not only for sizing actuators, but for measuring efficiency.
How you do torque measurements depend on the speed you want to make them at. For static loads, just put a lever of known length on the shaft and measure the force. Torque = distance * force. For fast rotating systems, you can run the system at a known speed and measure the electrical energy used.
You may also want to measure speeds and accelerations. Here, the ubiquity of cell phone cameras is your friend. Suppose you’re animating a crane on your model railroad. Record yourself on video moving the crane with your hands against a protractor to get a feel for speed and acceleration. In video editing software check the positions for various frames, and you now have position changes. The number of frames and distance can help you calculate the speed, and the change in speed vs time is acceleration.
If your mechanism is moving too fast for video, use a fast phototransistor or hall effect device and an oscilloscope, or gear down by holding a toy wheel against the shaft and measure the more slowly rotating wheel.
In the crane example, the torque you need to supply is the frictional torque plus the acceleration torque, and to calculate the acceleration torque you need the moment of inertia. For refresher: angular acceleration = torque / moment of inertia (ω = τ / I) and moment of inertia = mass * radius2 (I = m * r2 ) for point mass.
You can drive the crane with a repeatable torque, say using a pulley and weight or a motor, and get the acceleration ω1 from the still frames on your video. If you repeat this with a known mass m a known distance r from the shaft axis, like a lump of putty on the end of the crane arm, you can get a second value: ω2.
Write the ω = τ / I equations, ω1 = τ / Icrane and ω2 = τ / (Icrane + r 2 * m). Combining and isolating Icrane and holding our tongues just right, Icrane = r2 * m / (ω1 / ω2 – 1).
Be careful to subtract the moment of inertia of your measuring apparatus, and add in the moment of inertia of the final drive if needed. Now you can size your servo with some confidence. Believe me, once you’ve done this a couple times, you’ll never go back to winging it.
Power
The easiest way to get a ballpark feel for power is to simply measure the system’s consumed power by measuring the electrical power at the motor, but this ignores losses in the drive train. And losses are one of the really interesting things to measure. Bad performance is usually friction, and efficiency is a goal for other reasons than just motor sizing or battery life. It’s a measure of how janky your setup is.
Does your model train or robot run poorly? Set it to climb a steep grade on a test track. Calculate the work it does: mass * height change. Measure the input electrical power and the time, Energy = V*I*T. You now have an idea of how much the actual power consumption differs from the maximally efficient system. Any power that went in but didn’t appear as potential energy in the choo-choo’s new position is frictional loss. Now you can experiment with loosening and tightening screws, changing gear mesh, and such, and have some idea if you’re making things better or worse.
Conclusion
None of the above was rocket science, and you don’t need to do some complex FEM analysis to make the average hacker project. But a bit of real engineering can go a long way towards more reliable mechanisms, and that starts with knowing the numbers you’re dealing with. Taking the required measurements can be simple if you know how to build the tools you need, and your life will be easier with some numbers to guide you.