Cucumber is controllable over WiFi, which was simple enough to implement by virtue of the fact that it’s based around the Raspberry Pi Pico W. With its custom 3D-printed dog-like body, it’s able to move around on its four wheels driven by DC gear motors, and it can flex its limbs thanks to servos in its various joints. It’s able to follow someone with some autonomy thanks to its ultrasonic sensors, while it can also be driven around manually if so desired. To give it more animal qualities, it can also be posed, or commanded to bark, howl, or growl, with commands issued remotely via a web interface.
The level of sophistication is largely on the level of the robot dogs that were so popular in the early 2000s. One suspects it could be pretty decent at playing soccer, too, with the right hands behind the controls. Video after the break.
This machine is for winding brushless motors because manual winding is highly labor intensive. The machine in turn is made from four brushless motors. He is using the SimpleFOC library to implement closed-loop angle control. Closed-loop torque control is also used to maintain correct wire tension.
The system is controlled by an STM32G431 microcontroller. The motor driver used is the DRV8313. There are three GBM5208 75T Gimbal motors for close-loop angle control, and one BE4108 60T Gimbal motor for torque control. The torque control motor was built with this machine! [Yuchi] says that the Gimbal motors used are designed to be smooth, precise, and powerful at low speeds.
The components of the machine communicate with each other over a CAN bus. This simplifies wiring as components (such as motor controller boards) only require four connections.
We all love combat robotics for its creative problem solving; trying to fit drivetrains and weapon systems in a small and light package is never as simple as it appears to be. When you get to the real lightweights… throw everything you know out the window! [Shoverobotics] saw this as a barrier for getting into the 150g weight class, so he created the combat robotics platform named Project SVRN.
You want 4-wheel drive? It’s got it! Wedge or a Grabber? Of course! Anything else you can imagine? Feel free to add and modify the platform to your heart’s content! Controlled by a Malenki Nano, a receiver and motor controller combo board, the SVRN platform allows anyone to get into fairyweight fights with almost no experience.
With 4 N10 motors giving quick control, the platform acts as an excellent platform for various bot designs. Though the electronics and structure are rather simple, the most important and impressive part of Project SVRN is the detailed documentation for every part of building the bot. You can find and follow the documentation yourself from [Shoverobotics]’s Printables page here!
If you already know every type of coil found in your old Grav-Synthesized Vex-Flux from your Whatsamacallit this might not be needed for you, but many people trying to get into making need a ramp to shoot for the stars. For those needing more technical know-how in combat robotics, check out Kitten Mittens, a bot that uses its weapon for locomotion!
When it comes to hacks, the best ones go to extremes. Either beautiful in their simplicity, or magnificent in their excess. And, well, today’s hack is the latter: excessive. [HTX Studio] built an assembly line for origami pigeons!
One can imagine the planning process went something like this:
Make origami pigeon assembly line
?
Profit
But whatever the motivation, this is an impressive and obviously very well engineered machine. Even the lighting is well considered. It’s almost as if it were made for show…
Now, any self-respecting nerd should know the difference between throughput and latency. From what we could glean from the video, the latency through this assembly line is in the order of 50 seconds. Conservatively it could probably have say 5 birds in progress at a time. So let’s say every 10 seconds we have one origami pigeon off the assembly line. This is a machine and not a person so it can operate twenty four hours a day, save downtime for repairs and maintenance, call it 20 hours per day. We could probably expect more than 7,000 paper pigeons out of this machine every day. Let’s hope they’ve got a buyer lined up for all these birds.
If you’re interested in assembly lines maybe we could interest you in a 6DOF robotic arm, or if the origami is what caught your eye, check out the illuminating, tubular, or self-folding kind!
Your average 3D printer is just a nozzle shooting out hot plastic while being moved around by a precise robotic mechanism. There’s nothing stopping you replacing the robot and moving around the plastic-squirting nozzle yourself. That’s precisely what [3D Sanago] did to produce this cute little robot.
The beginning of the video sets the tone. “First we create the base that will become the robot vacuum’s body,” explains [3D Sanago]. “I quickly and precisely make a 15 x 15 cm square almost as if I were a 3D printer.” It’s tedious and tiring to move the 3D printing pen through the motions to build simple parts, but that’s the whole gimmick here. What’s wild is how good the results are. With the right post-processing techniques using an iron, [3D Sanago] is able to produce quite attractive plastic parts that almost justify the huge time investment.
The robot itself works in a fairly straightforward fashion. It’s got four gear motors driving four omniwheels, which let it pan around in all directions with ease. They’re under command of an Arduino Uno paired with a multi-channel motor driver board. The robot also has a servo-controlled arm for moving small objects. The robot lacks autonomy. Instead, [3D Sanago] gave it a wireless module so it could be commanded with a PS4 controller. Despite being referred to as a “robot vacuum,” it’s more of a general “cleaning robot” since it only has an arm to move objects, with no actual vacuum hardware. It’s prime use? Picking up socks.
Here is a hacker showing off their engineering chops. This video shows successive design iterations for a LEGO vehicle which can cross increasingly large gaps.
At the time of writing this video from [Brick Experiment Channel] has been seen more than 110,000,000 times, which is… rather a lot. We guess with a view count like that there is a fairly good chance that many of our readers have already seen this video, but this is the sort of video one could happily watch twice.
This video sports a bunch of engineering tricks and approaches. We particularly enjoy watching the clever use of center of gravity. They hack gravity to make some of their larger designs work.
The AI effects we know these days were once preceded by CGI, and those were once preceded by true hand-built physical props. If that makes you think of Muppets, this video will change your mind. In a behind-the-scenes look with [Adam Savage], effects designer [Mark Setrakian] reveals the full animatronic glory of Mr. Wink’s mechanical fist from Hellboy II: The Golden Army (2008) – and this beast still flexes.
Most of this arm was actually made in 2003, when 3D printing was very different than what we think of today. Printed on a Stratasys Titan – think: large refrigerator-sized machine, expensive as sin – the parts were then hand-textured with a Dremel for that war-scarred, brutalist feel. This wasn’t just basic animatronics for set dressing. This was a fully actuated prop with servo-driven finger joints, a retractable chain weapon, and bevel-geared mechanisms that scream mechanical craftsmanship.
Each finger is individually designed. The chain reel: powered by a DeWalt drill motor and custom bevel gear assembly. Every department: sculptors, CAD modelers, machinists, contributed to this hybrid of analog and digital magic. Props like this are becoming unicorns.
Dutch research institute [AMOLF] shows off a small robot capable of walking, hopping, and swimming without any separate control system. The limbs synchronize thanks to the physical interplay between the robot’s design and its environment. There are some great videos on that project page, so be sure to check it out.
A kinked soft tube oscillates when supplied with continuous air.
Powered by a continuous stream of air blown into soft, kinked tubular limbs, the legs oscillate much like the eye-catching “tube man” many of us have seen by roadsides. At first it’s chaotic, but the movements rapidly synchronize into a meaningful rhythm that self-synchronizes and adapts. On land, the robot does a sort of hopping gait. In water, it becomes a paddling motion. The result in both cases is a fast little robot that does it all without any actual control system, relying on physics.
You can watch it in action in the video, embedded below. The full article“Physical synchronization of soft self-oscillating limbs for fast and autonomous locomotion” is also available.
Gait control is typically a nontrivial problem in robotics, but it doesn’t necessarily require a separate control system. Things like BEAM robotics and even the humble bristlebot demonstrate the ability for relatively complex behavior and locomotion to result from nothing more than the careful arrangement of otherwise simple elements.
DIY mechatronics always has some unique challenges when relying on simple tools. 3D printing enables some great abilities but high precision gearboxes are still a difficult problem for many. Answering this problem, [Sergei Mishin] has developed a very interesting gearbox solution based on a research paper looking into simple rollers instead of traditional gears. The unique attributes of the design come from the ability to have a compact angled gearbox similar to a bevel gearbox.
Multiple rollers rest on a simple shaft allowing each roller to have independent rotation. This is important because having a circular crown gear for angled transmission creates different rotation speeds. In [Sergei]’s testing, he found that his example gearbox could withstand 9 Nm with the actual adapter breaking before the gearbox showing decent strength.
Of course, how does this differ from a normal bevel gear setup or other 3D printed gearboxes? While 3D printed gears have great flexibility in their simplicity to make, having plastic on plastic is generally very difficult to get precise and long lasting. [Sergei]’s design allows for a highly complex crown gear to take advantage of 3D printing while allowing for simple rollers for improved strength and precision.
While claims of “zero backlash” may be a bit far-fetched, this design still shows great potential in helping make some cool projects. Unique gearboxes are somewhat common here at Hackaday such as this wobbly pericyclic gearbox, but they almost always have a fun spin!
Some readers may recall building a line-following robot during their school days. Involving some IR LEDs, perhaps a bit of LEGO, and plenty of trial-and-error, it was fun on a tiny scale. Now imagine that—but rideable. That’s exactly what [Austin Blake] did, scaling up a classroom robotics staple into a full-size vehicle you can actually sit on.
The robot uses a whopping 32 IR sensors to follow a black line across a concrete workshop floor, adjusting its path using a steering motor salvaged from a power wheelchair. An Arduino Mega Pro Mini handles the logic, sending PWM signals to a DIY servo. The chassis consists of a modified Crazy Cart, selected for its absurdly tight turning radius. With each prototype iteration, [Blake] improved sensor precision and motor control, turning a bumpy ride into a smooth glide.
The IR sensor array, which on the palm-sized vehicle consisted of just a handful of components, evolved into a PCB-backed bar nearly 0.5 meters wide. Potentiometer tuning was a fiddly affair, but worth it. Crashes? Sure. But the kind that makes you grin like your teenage self. If it looks like fun, you could either build one yourself, or upgrade a similar LEGO project.
One of the most basic problems with robotic arms and similar systems is keeping the weight down, as more weight requires a more rigid frame and stronger actuators. Cable-driven systems are a classic solution, and a team of researchers from MIT and Zhejiang University recently shared some techniques for designing fully 3D printed cable-driven mechanisms.
The researchers developed a set of four primitive motion components: a bending component, a coil, screw-like, and a compressive component. These components can work together in series or parallel to make much more complicated structures. To demonstrate, the researchers designed a gripping tentacle, a bird’s claw, and a lizard-like walking robot, but much more complicated structures are certainly possible. Additionally, since the cable itself is printed, it can have extra features, such as a one-way ratcheting mechanism or bumps for haptic feedback.
These printed cables are the most novel aspect of the project, and required significant fine-tuning to work properly. To have an advantage over manually-assembled cable-driven systems, they needed to be print-in-place. This required special printer settings to avoid delamination between layers of the cable, cables sticking to other components, or cables getting stuck in the mechanism’s joints. After some experiments, the researchers found that nylon filament gives the best balance between cable strength and flexibility, while not adhering tightly to the PLA structure.
One might be tempted to think that re-creating a film robot from the 1950s would be easy given all the tools and technology available to the modern hobbyist, but as [Mike Ogrinz]’s quest to re-create Robby the Robot shows us, there is a lot moving around inside that domed head, and requires careful and clever work.
The “dome gyros” are just one of the complex assemblies, improved over the original design with the addition of things like bearings.
Just as one example, topping Robby’s head is a mechanical assembly known as the dome gyros. It looks simple, but as the video (embedded below) shows, re-creating it involves a load of moving parts and looks like a fantastic amount of work has gone into it. At least bearings are inexpensive and common nowadays, and not having to meet film deadlines also means one can afford to design things in a way that allows for easier disassembly and maintenance.
Robby the Robot first appeared in the 1956 film Forbidden Planet and went on to appear in other movies and television programs. Robby went up for auction in 2017 and luckily [Mike] was able to take tons of reference photos. Combined with other enthusiasts’ efforts, his replica is shaping up nicely.
We’ve seen [Mike]’s work before when he shared his radioactive Night Blossoms which will glow for decades to come. His work on Robby looks amazing, and we can’t wait to see how it progresses.
[Tazer] built a small desktop-sized robotic arm, and it was more or less functional. However, he wanted to improve its ability to pick things up, and attaching a pneumatic gripper seemed like the perfect way to achieve that. Thus began the build!
The concept of [Tazer]’s pneumatic gripper is simple enough. When the pliable silicone gripper is filled with air, the back half is free to expand, while the inner section is limited in its expansion thanks to fabric included in the structure. This causes the gripper to deform in such a way that it folds around as it fills with air, which lets it pick up objects. [Tazer] designed the gripper so that that could be cast in silicone using 3D printed molds. It’s paired with a 3D printed manifold which delivers air to open and close the gripper as needed. Mounted on the end of [Tazer]’s robotic arm, it’s capable of lifting small objects quite well.
China played host to what, presumably, was the world’s first robot and human half-marathon. You can check out the action and the Tiangong Ultra robot that won in the video below. The event took place in Beijing and spanned 21.1 km. There was, however, a barrier between lanes for humans and machines.
The human rules were the same as you’d expect, but the robots did need a few concessions, such as battery swap stops. The winning ‘bot crossed the finish line in just over 160 minutes. However, there were awards for endurance, gait design, and design innovation.
Humans still took the top spots, though. We also noted that some of the robots had issues where they lost control or had other problems. Even the winner fell down once and had three battery changes over the course.
Of the 21 robots that started, only six made the finish line. We don’t know how many of the 12,000 humans finished, but we are pretty sure it was more than six, so we don’t think runners have to worry about robot overlords yet. But they’re getting better all the time.
How far can you stretch a measuring tape before it buckles? The answer probably depends more on the tape than the user, but it does show how sturdy the coiled spring steel rulers can be. [Gengzhi He et. al.] may have been playing that game in the lab at UC San Diego when they hit upon the idea for a new kind of low-cost robotic gripper.
Four motors, four strips of measuring tape (doubled up)– one robot hand.
With the lovely backronym “GRIP-tape” — standing for Grasping and Rolling in Plane — you get a sense for what this effector can do. Its two “fingers” are each made of loops of doubled-up measuring tape bound together with what looks suspiciously like duck tape. With four motors total, the fingers can be lengthened or shortened by spooling the tape, allowing a reaching motion, pivot closer or further apart for grasping, and move-in-place like conveyor belts, rotating the object in their grasp.
The combination means it can reach out, grab a light bulb, and screw it into a socket. Or open and decant a jar of spices. Another video shows the gripper reaching out to pick a lemon, and gently twist it off the tree. It’s quite a performance for a device with such modest components.
At the moment, the gripper is controlled via remote; the researchers plan on adding sensors and AI autonomous control. Read all the details in the preprint, or check below the fold to watch the robot in action.
This is hardly the first time we’ve highlighted a grabby robot. We’ve seen belts, we’ve seen origami — but this is the first time we’ve seen a measuring tape. Have you seen a cool robot? Toss us a tip. We’d love to hear from you.
Tip of the hat to reader [anonymouse] for pointing this one out.
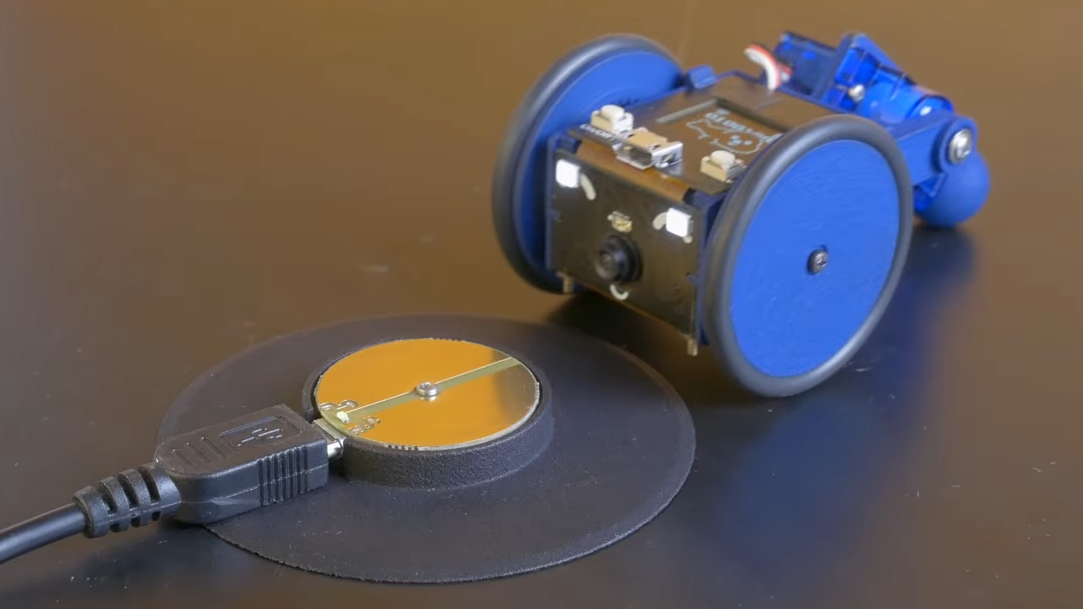
[Charmed Labs] are responsible for bringing numerous open-source hardware products to fruition over the years, and their latest device is an adorably small robotic camera platform called Goby, currently crowdfunding for its initial release. Goby has a few really clever design features and delivers a capable (and hackable) platform for under 100 USD.
Goby embraces its small size, delivering what its creators dub “tinypresence” — or the feeling of being there, but on a very small scale. Cardboard courses, LEGO arenas, or even tabletop gaming scenery hits different when experienced from a first-person perspective. Goby is entirely reprogrammable with nothing more than a USB cable and the Arduino IDE, while costing less than most Arduino starter kits.
Recharging happens by driving over the charger, then pivoting down so the connectors (the little blunt vampire fangs under and to each side of the camera) come into contact with the charger.
One of the physical features we really like is the tail-like articulated caster at the rear. Flexing this pivots Goby up or down (and can even flip Goby completely over), allowing one to pan and tilt the view without needing to mount the camera on a gimbal. It also comes into play for recharging; Goby simply moves over the disc-shaped charger and pivots down to make contact.
At Goby‘s heart is an ESP32-S3 and OmniVision OV2640 camera sensor streaming a live video feed (and driving controls) with WebRTC. Fitting the WebRTC stack onto an ESP32 wasn’t easy, but opens up possibilities beyond just media streaming.
Goby is set up to make launching an encrypted connection as easy as sharing a URL or scanning a QR code. The link is negotiated between bot and client with the initial help of an external server, and once a peer-to-peer connection is established, the server’s job is done and it is out of the picture. [Charmed Labs]’s code for this functionality — named BitBang — is in beta and destined for an open release as well. While BitBang is being used here to make it effortless to access Goby remotely, it’s more broadly intended to make web access for any ESP32-based device easier to implement.
As far as tiny remote camera platforms go, it might not be as small as rebuilding a Hot Wheels car into a micro RC platform, but it’s definitely more accessible and probably cheaper, to boot. Check it out at the Kickstarter (see the first link in this post) and watch it in action in the video, embedded just below the page break.
Running a dairy farm used to be a rather hands-on experience, with the farmer required to be around every few hours to milk the cows, feed them, do all the veterinarian tasks that the farmer can do themselves, and so on. The introduction of milking machines in the early 20th century however began a trend of increased automation whereby a single farmer could handle a hundred cows by the end of the century instead of only a couple. In a recent article in IEEE Spectrum covers the continued progress here is covered, including cows milking themselves, on-demand style as shown in the top image.
The article focuses primarily on Dutch company Lely’s recent robots, which range from said self-milking robots to a manure cleaning robot that looks like an oversized Roomba. With how labor-intensive (and low-margin) a dairy farm is, any level of automation that can improve matters will be welcomed, with so far Lely’s robots receiving a mostly positive response. Since cows are pretty smart, they will happily guide themselves to a self-milking robot when they feel that their udders are full enough, which can save the farmer a few hours of work each day, as this robot handles every task, including the cleaning of the udders prior to milking and sanitizing itself prior to inviting the next cow into its loving embrace.
As for the other tasks, speaking as a genuine Dutch dairy farm girl who was born & raised around cattle (and sheep), the idea of e.g. mucking out stables being taken over by robots is something that raises a lot more skepticism. After all, a farmer’s children have to earn their pocket money somehow, which includes mucking, herding, farm maintenance and so on. Unless those robots get really cheap and low maintenance, the idea of fully automated dairy farms may still be a long while off, but reducing the workload and making cows happier are definitely lofty goals.
Top image: The milking robot that can automatically milk a cow without human assistance. (Credit: Lely)